Drilling into the Future: A Hybrid Approach to Predicting Stick/Slip
Drilling into the Future: A Hybrid Approach to Predicting Stick/Slip
Stick/slip is a common problem in drilling operations that can cause significant delays, damage to equipment, and even affect the success of the well. It happens when the energy generated by the rotary system on a drilling rig doesn't reach the drill bit efficiently, resulting in a buildup of energy in the drill string, which causes the bit rotation to speed up and slow down erratically. This can cause the drill string to stop or reverse its rotation in extreme cases.
Traditionally, stick/slip has been addressed through manual adjustments of drilling parameters like weight on bit (WOB) and rotations per minute (RPM), relying on the experience of the drilling crew. However, this approach is often inefficient, time-consuming, and prone to human error. Wouldn’t it be amazing if there was a tool that could revolutionize drilling operations by providing drillers with valuable insights into the potential for stick/slip one stand in advance during the well construction operation, allowing them to proactively adjust drilling parameters and avoid costly downtime and equipment damage? Well, this blog unveils a tool (Sheth, et al. 2022) that does just that!
The Challenges of Stick/Slip Prediction
Predicting stick/slip is a complex task due to the intricate interplay of several factors, including:
- Drill-string Dynamics: The physical characteristics of the drill-string, such as its length, weight, and stiffness, significantly impact the energy transfer and rotation dynamics.
- Rock Formation Properties: The type and properties of the rock formation being drilled, such as its strength, hardness, and friction coefficient, directly influence the resistance encountered by the drill bit.
- Drilling Parameters: The drilling parameters controlled by the operator, such as WOB, RPM, and mud flow rate, have a direct effect on the drill-string's behavior and the occurrence of stick/slip.
The Evolution of Stick/Slip Prediction Methods
Various attempts have been made to predict stick/slip, ranging from simple rule-based approaches to sophisticated physics-based and data-driven models. However, each method has its limitations:
- Rule-Based Approaches: These methods rely on predefined rules based on expert knowledge, often failing to capture the full complexity of the drilling process and struggling to adapt to changing conditions.
- Physics-Based Approaches: These methods are based on well-understood physical laws and principles, making them easier to understand and validate as they are interpretable. However, developing these models can be complex and time-consuming, and high-fidelity simulations can be computationally expensive, especially for large-scale or high-dimensional problems. These approaches may also struggle to adapt to unmodeled phenomena and require precise parameter values that can be difficult to obtain or estimate.
- Data-Driven Machine Learning (ML) Models: These models learn patterns from historical drilling data and can be very effective in making predictions. However, they can be prone to overfitting, meaning they perform poorly on data outside of their training set. Moreover, these models lack the underlying understanding of physics, making them less robust and sometimes leading to counterintuitive predictions.
Physics-Informed Machine Learning (PIML) approaches incorporate physical principles into machine learning algorithms, resulting in a more accurate, robust, and reliable approach to tackle the challenges of stick/slip prediction by:
- Leveraging Physics-Based Models: PIML utilizes physics-based models to incorporate the underlying dynamics of the drill string system into the prediction process. This ensures that the predictions align with the physical laws governing the system, making them more robust and reliable.
- Harnessing the Power of Machine Learning: PIML utilizes machine learning algorithms to analyze historical drilling data, identify complex patterns, and improve prediction accuracy. This allows for the integration of a vast amount of data, enabling the model to adapt to changing conditions and capture nuances that might be missed by physics-based models alone.
In addition to PIML algorithms, another aspect of successful stick/slip prediction was combining SLB’s subject matter expertise in both the drilling and AI domains to model the stick/slip prediction problem in a hybrid manner, rather than formulating this problem in a canonical or textbook manner relying on either physics-based thinking or AI-based thinking.
A PIML Framework for Stick/Slip Prediction
To that end, we developed a new Extended Physics-Guided Neural Network (PGNN)- based stick/slip prediction algorithm that builds upon the PGNN approach presented in (Daw, et al. 2022). This framework combines multiple physics-based and ML models to achieve a comprehensive and robust prediction system. The Extended PGNN Framework consists of two essential parts:
- Combining Physics and ML: This involves integrating the output of physics-based models with the outputs of ML models. The physics-based models provide a fundamental understanding of the drill string system, while the ML models capture the complex patterns and trends observed in historical drilling data.
- Ensemble Modeling: The outputs of the combined physics-ML models are then integrated into a single, unified prediction using ensemble modeling techniques. This approach leverages the strengths of multiple models, improving the overall robustness and accuracy of the predictions.
The State-Space Modeling Approach
We utilized state-space modeling to represent the drill string system, providing a framework to model the system's behavior over time. The state-space model consists of two components:
- State Transition Model: This model describes how the system's hidden state changes over time based on the input parameters. It is essentially a mathematical representation of the drill string's physical dynamics.
- Observation Model: This model relates the observable quantities, such as surface RPM, torque, and WOB, to the system's internal state. It helps translate the drill string's internal state into measurable values.
We developed five versions of the state-space model, each using a different representation for the state-transition and observation models. These include:
- Physics-based: Both the state-transition model and the observation model are represented using physics equations.
- XGBoost-based: The state-transition model is based on physics equations, while the observation model is represented using an XGBoost algorithm, a powerful machine learning algorithm known for its high accuracy and efficiency.
- Fully Connected Neural Network: Both the state-transition model and the observation model are represented using fully connected neural networks, which are capable of learning complex relationships within the data.
- Long Short-Term Memory (LSTM)-based: The state-transition model is represented using an LSTM network, a type of recurrent neural network specifically designed for handling sequential data and capturing long-term dependencies. The observation model is represented using a fully connected neural network.
- Markov Recurrent Neural Network (MarkovRNN)-based: The state-transition model is represented using a MarkovRNN, which incorporates the Markov property into the RNN architecture, allowing for more efficient and accurate handling of sequential data with complicated latent information. The observation model is represented using a fully connected neural network.
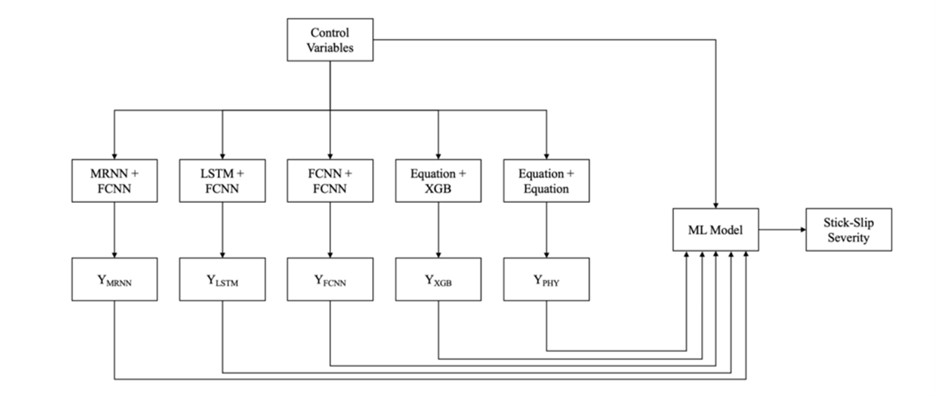
Figure 1: Schematic diagram representing the overall structure of the extended PGNN framework.
For each of these 5 versions, the networks representing state-transition and state-observation models are jointly trained in an end-to-end manner so that the uncertainties and errors coming from one are accounted for by both.
The Stick/Slip Advisor: A Visual Tool for Drilling Operators
The final output of the Extended PGNN framework is presented in the form of a visual "Stick/Slip Advisor," a grid-based dashboard that provides drillers with a clear and intuitive understanding of the potential for stick/slip in the next stand. Each cell on the grid represents a specific combination of WOB and RPM ranges, and the color of the cell indicates the predicted stick/slip severity for that combination. This is particularly useful for making decisions while drilling, as just knowing the Stick/Slip doesn’t provide any additional value to the drillers.
This visual tool enables drillers to:
- Identify Safe Operating Zones: Easily identify the regions on the grid that correspond to low stick/slip risk, allowing them to choose safe and efficient drilling parameters.
- Avoid High-Risk Zones: Visually identify the regions on the grid that correspond to high stick/slip risk, allowing them to avoid those combinations of WOB and RPM and prevent potential problems.
- Optimize Drilling Parameters: Make informed decisions about drilling parameters, ensuring maximum energy transfer to the bit while minimizing the risk of stick/slip.
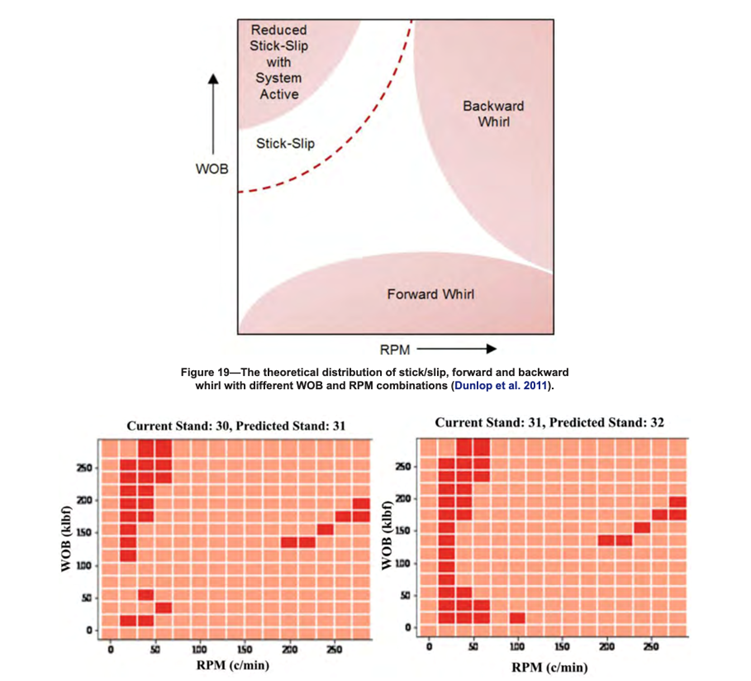
Figure 2: Grid representing the WOB and ROP combinations of a particular stand. The red cells correspond to the combinations that lead to extreme stick/slip cases; hence, these should be avoided.
The high operational values for WOB and RPM, shown in Figure 2, are specifically chosen to highlight the model's generalizing capabilities across the normal operating conditions available in the training data.
The Advantages of the Hybrid PIML Approach for Stick/Slip Prediction
The combination of physics-based models and ML algorithms in the Extended PGNN framework offers several advantages over traditional methods for stick/slip prediction:
- Improved Accuracy and Robustness: The integration of physical principles into the prediction process makes the predictions more robust and less susceptible to overfitting, leading to more reliable results.
- Enhanced Generalization: The model's ability to learn from historical data allows it to generalize to new and unseen drilling conditions, making it more adaptable to changing environments.
- Interpretable Predictions: The framework provides a clear and intuitive visual representation of the predictions, making it easier for drillers to understand and apply the insights.
- Proactive Problem Prevention: By predicting stick/slip in advance, drillers can proactively adjust drilling parameters and prevent costly downtime and equipment damage.
Moreover, this approach, by having footing on causality and SME knowledge, makes it easier to pass the barrier of adoption in this operational setting, particularly compared to pure data analytics approaches.
Conclusion: A New Era in Drilling Efficiency
The hybrid approach to stick/slip prediction presented in this blog represents a significant leap forward in addressing a persistent challenge in the drilling industry. By combining the power of physics-based models and advanced machine learning algorithms, this approach offers a more accurate, robust, and reliable way to predict stick/slip, enabling drillers to make informed decisions and optimize drilling operations. We have executed various field tests for this solution internally, which have ratified that the direction taken is valid, and the lessons learned on those field tests have given us several improvement directions, which are to be explored in the coming months. As this technology continues to evolve, we can expect to see even more sophisticated and powerful solutions for stick/slip prediction, ultimately leading to increased drilling efficiency, reduced costs, and improved well safety. This hybrid approach, showcasing the seamless integration of physics and data-driven methods, exemplifies the exciting future of AI in the oil and gas industry, paving the way for a more intelligent and sustainable future of drilling.
Bibliography
- Daw, Arka, Anuj Karpatne, William D. Watkins, Jordan S. Read, and Vipin Kumar. 2022. "Physics-Guided Neural Networks (PGNN): An Application in Lake Temperature Modeling." In Knowledge Guided Machine Learning, 353-372. Chapman and Hall/CRC.
- Gupta , Soumya, Crispin Chatar, and José Celaya. 2019. "Machine Learning Lessons Learnt in Stick-Slip Prediction." Abhu Dhabi International Petroleum Exhibition and Conference. Abu Dhabi: SPE.
- Sheth, Prasham, Indranil Roychoudhury, Crispin Chatar, and José Celaya. 2022. "A Hybrid Physics-Based and Machine-Learning Approach for Stick/Slip Prediction." IADC/SPE International Drilling Conference and Exhibition. Galveston, TX: SPE.